Digital Twin for UAVs: Risk-Free Drone Stabilisation
Maedcore develops a digital twin to simulate and optimise UAV drone stabilisation. PID algorithms, dynamic simulation and testing without physical risk.
Written by Maedcore
Drone Stabilisation with Digital Twin: UAV Development Without Physical Risk
Executive summary: Maedcore developed an advanced simulation environment — a digital twin — specifically designed for drone (UAV) stabilisation. This system accurately replicates the real flight dynamics of the device, including wind effects, inertia and accelerations, allowing control algorithms (PID, adaptive control, feedback control) to be implemented and compared in a completely safe environment. The result: faster development cycles, no physical prototype damage and greater precision in parameter tuning.
The Challenge: Testing Drones Is Costly and Risky
Developing UAVs (Unmanned Aerial Vehicles) requires exhaustive testing before flight stability and manoeuvrability can be guaranteed under real conditions. However, direct tests on physical hardware present serious risks:
- Control system failures causing collisions or crashes.
- Damage or destruction of the prototype, with high replacement costs.
- Risk to people and infrastructure in the test environment.
- Slow development cycles due to the need to rebuild or repair between tests.
Maedcore’s solution was to create a digital twin simulation environment that eliminates these risks without sacrificing result accuracy.
The Solution: Digital Twin for Drone Stabilisation
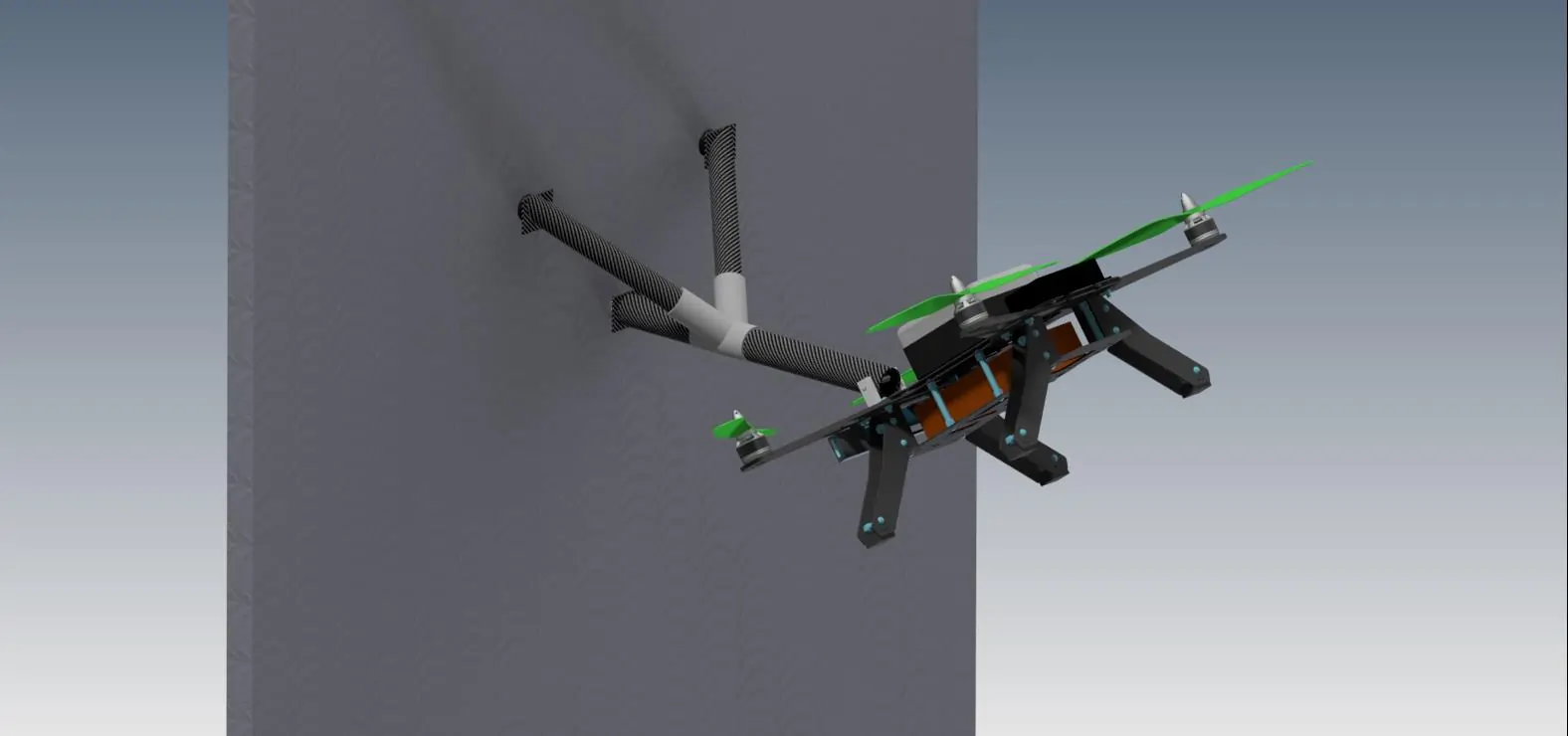
A digital twin is a virtual replica of a physical system that behaves in the same way as its real counterpart. In the case of drones, this means mathematically modelling all the factors that influence flight and creating an environment where control algorithms can be tested, adjusted and validated before being transferred to hardware.
Technical Components of the Digital Twin
1. Dynamic Flight Simulation
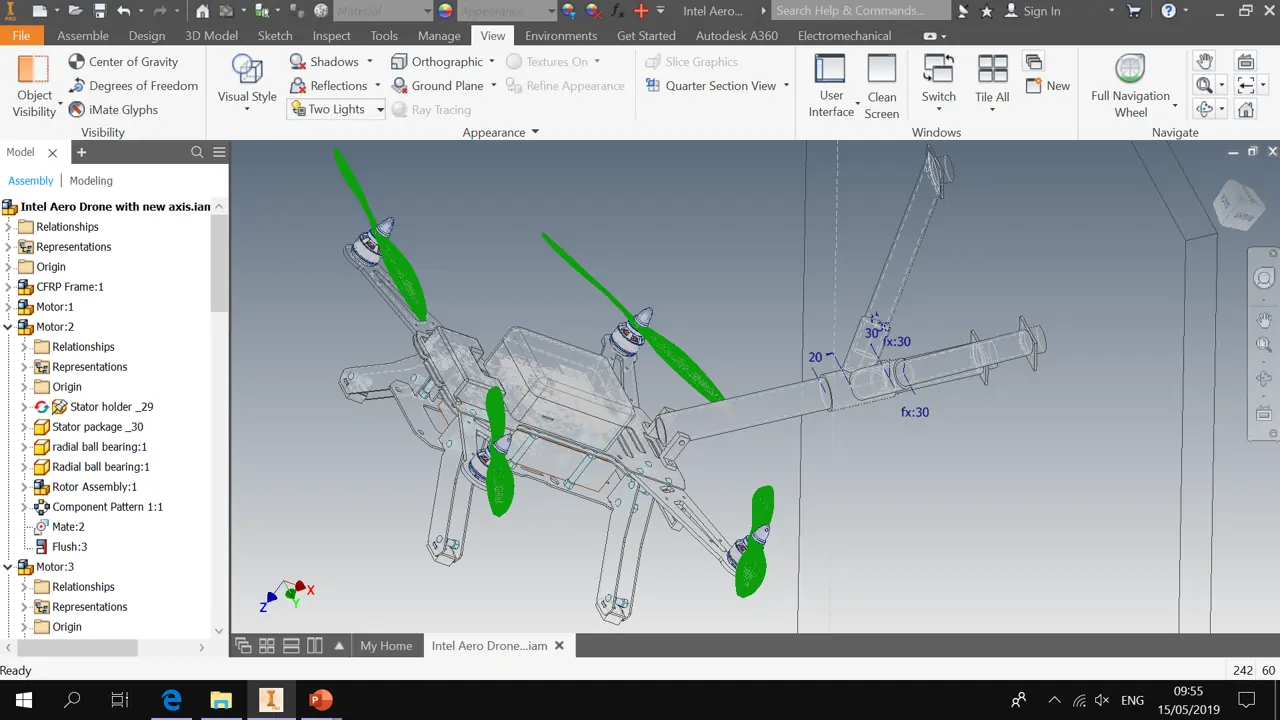
The mathematical flight model faithfully replicates:
- Aerodynamic drag — wind and turbulence effects on stability.
- Rotational inertia — drone behaviour in turns and angular velocity changes.
- Acceleration effects — dynamic response to sudden direction or altitude changes.
- External disturbances — wind gusts, load changes, temperature variations.
The simulation runs in real time, allowing the system’s response to be observed as control parameters are adjusted.
2. Implementation and Comparison of Control Algorithms
The digital twin supports the implementation of multiple control strategies, allowing their performance to be compared under identical conditions:
- PID control (Proportional-Integral-Derivative) — the reference standard for drone stabilisation.
- Feedback control — continuous adjustment based on the deviation between actual and desired state.
- Adaptive control — automatic parameter modification based on flight conditions.
- Robust control — designed to maintain stability under unforeseen disturbances.
3. Safe Testing and Real-Time Parameter Tuning
The virtual environment allows control parameters to be modified in real time and the immediate impact on the simulated drone’s stability to be observed. This transforms what was previously a trial-and-error process with real hardware into an analytical and systematic optimisation process.
Quantifiable Benefits of the Digital Twin for UAVs
| Parameter | Traditional Development | With Maedcore Digital Twin |
|---|---|---|
| Risk of prototype damage | High | Eliminated |
| Cost per test cycle | High (repair/replacement) | Minimal (computational only) |
| Time per control iteration | Days (assembly, testing, analysis) | Hours or minutes |
| Parameter tuning precision | Limited by real conditions | High (controllable conditions) |
| Test environment safety | Requires cleared area and precautions | No physical safety restrictions |
Future Applications of the Digital Twin in UAVs
The technology developed in this project has direct applications across multiple sectors:
Aeronautics and logistics: optimisation of parcel delivery drones, infrastructure monitoring drones and aerial inspection systems.
Precision agriculture: drones for spraying and agronomic data collection with optimised trajectories.
Defence and security: development of surveillance and reconnaissance UAVs with high-precision manoeuvring algorithms.
Research and development: testing platform for new drone designs without needing to manufacture physical prototypes at each iteration.
Technologies Used
Project developed with: Mechatronics — Robotics — Artificial Intelligence — Embedded Systems — Data Analysis
Do You Develop UAVs or Complex Control Systems?
A digital twin can drastically reduce the time and cost of developing your drone or robotic system. Request a technical consultation and we will assess whether this solution is applicable to your project.
Request Technical Consultation | View Mechatronics Projects | Robotics Services
Ready to transform your company?
Book a free 30-minute meeting with an engineer.

