Diseño de Producto IoT Wearable: Ingeniería de Carcasa GPS y DFM
Maedcore entrega el diseño completo de un producto IoT wearable: integración GPS, modelado 3D optimizado para DFM, factor de forma multi-fijación y renders.
Publicado por Eduardo Fuentevilla Blanco
Ingeniero de Robótica en Maedcore · Ingeniero de Robótica LinkedIn ↗
Diseño de Producto IoT Wearable: Ingeniería de Carcasa GPS y DFM
Resumen ejecutivo: Maedcore entregó el ciclo completo de diseño de producto para un dispositivo IoT wearable con GPS: desde la especificación funcional y la planificación de disposición de componentes hasta el modelado 3D de carcasa optimizado para DFM, el desarrollo del factor de forma multi-fijación y los renders fotorrealistas para entrega a fabricación. El alcance de ingeniería cubrió las restricciones de integración del módulo GPS (distancia de la antena, requisitos del plano de tierra, blindaje RF), gestión térmica dentro de una carcasa de plástico sellada, diseño mecánico de puntos de fijación múltiples (llavero, clip, fijación a bolsa) y especificación de materiales para moldeo por inyección. El cliente fue Calmtag, una startup española de IoT. La metodología y los entregables son los mismos que Maedcore aplica a carcasas de sensores industriales, dispositivos de campo robustecidos y carcasas de hardware embebido en cualquier sector.
El Brief de Ingeniería
Calmtag requería un dispositivo de seguimiento GPS en un factor de forma que las personas realmente llevarían sin estigma ni inconveniencia. Las restricciones clave de ingeniería:
Rendimiento RF dentro de una carcasa de consumidor. Los módulos GPS tienen requisitos estrictos de distancia de antena — distancias mínimas de componentes metálicos, planos de tierra y paredes de la carcasa — que restringen directamente la disposición de componentes y la geometría de la carcasa. Violar estas restricciones degrada la precisión de fix GPS y el tiempo hasta el primer fix.
Carcasa sellada y compacta para un sistema multi-componente. El dispositivo contiene un módulo GPS, hardware de comunicación celular, batería y circuitos de gestión de energía. Todo debe caber dentro de una carcasa sellada suficientemente pequeña para fijarse a un llavero o clip de mochila — sin cableado externo ni conectores expuestos.
Factor de forma multi-fijación. El dispositivo debe fijarse de forma confiable a un llavero, una cremallera de mochila, una correa de bolsa y un clip de ropa — cuatro interfaces mecánicas distintas — sin que ninguna de las cuatro requiera una variante de carcasa diferente.
Preparación DFM. El entregable de diseño final debe ser fabricable mediante moldeo por inyección sin cambios de diseño. La uniformidad del grosor de pared, los ángulos de desmoldeo, la evitación de socavados y la colocación de compuertas deben resolverse en la etapa CAD.
Fase 1: Especificación Funcional y Disposición de Componentes
El proceso de diseño comenzó con una especificación detallada de componentes:
- Módulo GPS seleccionado por su huella compacta (12 × 16 mm) y soporte de antena integrado.
- Capacidad de batería dimensionada para 72 horas de seguimiento continuo dentro del volumen objetivo del factor de forma.
- Módulo celular posicionado para un rendimiento óptimo de la antena — alejado del módulo GPS para minimizar la interferencia RF.
- IC de gestión de energía colocado adyacente a la batería con requisitos de trazado de pistas cortas.
Con todos los componentes especificados, Maedcore produjo el primer modelo CAD como un estudio de disposición de componentes — sin geometría de carcasa, solo bloques de componentes con sus envolventes de distancia. Este estudio de disposición definió el volumen interno mínimo de la carcasa.
Fase 2: Desarrollo de Geometría de Carcasa
Conceptos Iniciales
Se desarrollaron tres conceptos de carcasa en paralelo, explorando diferentes enfoques de lenguaje formal:
- Orgánico — superficies curvas continuas, sin bordes agudos, sección transversal similar a un guijarro.
- Angular — caras planas con transiciones achaflanadas, fuerte identidad visual, más fácil de agarrar.
- Híbrido — superficies primarias orgánicas con detalles de acento angulares para identidad de marca.
Cada concepto fue evaluado contra los requisitos del sistema de fijación, las restricciones DFM y la envolvente de disposición de componentes.
Refinamiento Iterativo
Se completaron tres iteraciones completas de diseño:
Iteración 1: Estableció la geometría básica de la carcasa y el ajuste de componentes. Problemas identificados: grosor de pared en regiones curvadas demasiado delgado para moldeo por inyección; ángulo de desmoldeo de la orejeta de fijación insuficiente.
Iteración 2: Corrigió la uniformidad del grosor de pared; aumentó el ángulo de desmoldeo de la orejeta de fijación a 2°; añadió nervaduras internas para rigidez estructural. Problema identificado: el mecanismo de clip único no soportaba todas las configuraciones de fijación objetivo.
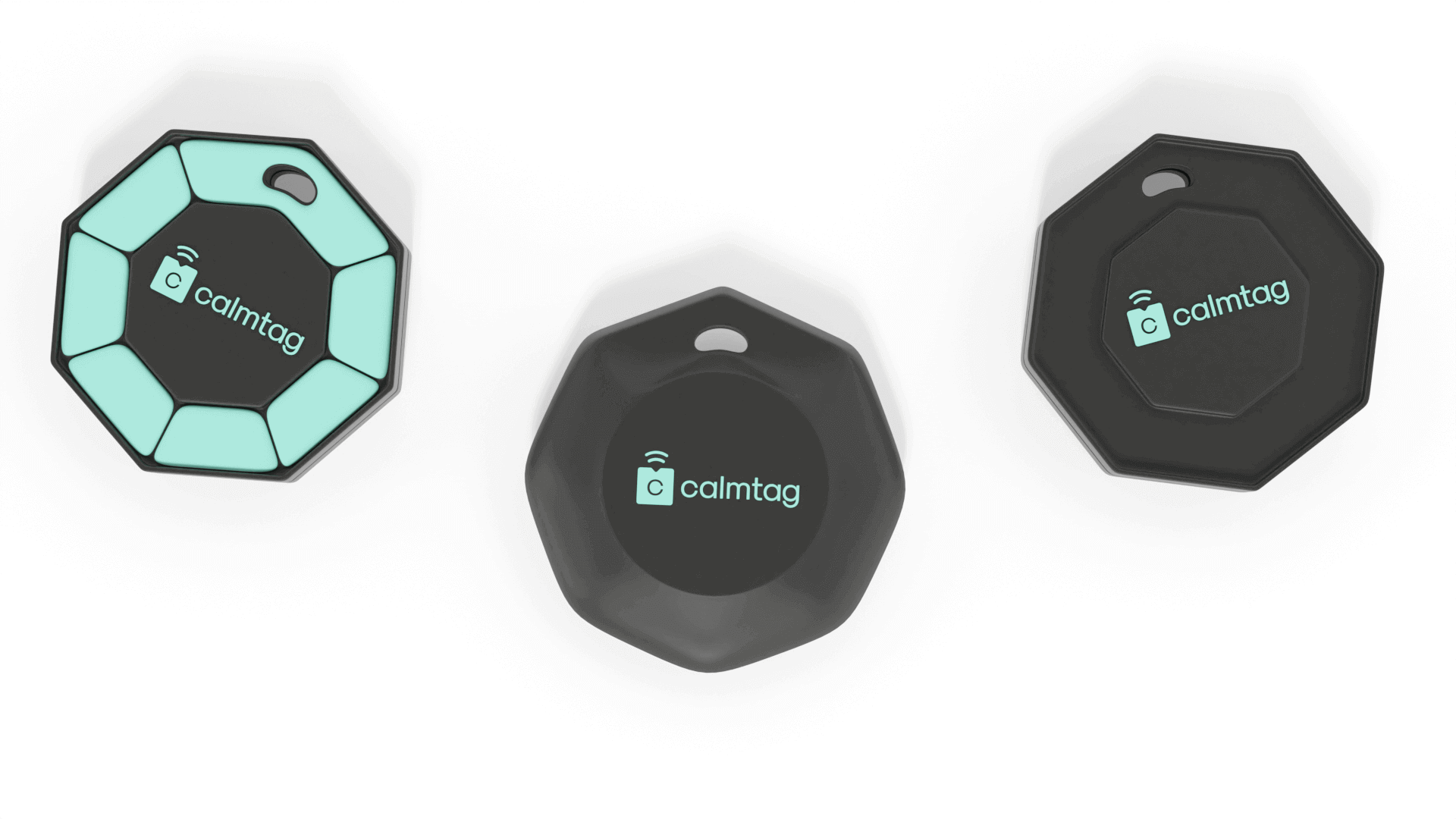
Iteración 3: Rediseño del sistema de fijación a un rail deslizante multi-modo que acepta cuatro accesorios de fijación intercambiables (orejeta de llavero, clip, bucle de bolsa, espalda plana). Cada accesorio se encaja en el rail y se bloquea con un giro de cuarto de vuelta — sin herramientas. Esto resolvió el requisito multi-fijación sin añadir variantes de carcasa.
Fase 3: Validación DFM
Antes de proceder a los renders finales, el diseño fue evaluado contra los requisitos de fabricabilidad para moldeo por inyección:
| Criterio DFM | Estado |
|---|---|
| Uniformidad de grosor de pared (1,2–2,5 mm) | Conforme en todo |
| Ángulos de desmoldeo en todas las superficies verticales | ≥ 1,5° en todas las caras |
| Socavados | Eliminados — todos convertidos a características de acción lateral |
| Colocación de compuerta | Dos opciones de compuerta validadas; compuerta primaria en la base del rail de fijación |
| Ubicación de línea de partición | Establecida en el perímetro de la carcasa, oculta por el rail de fijación |
| Fuerza de enganche de ajuste a presión | 8–12 N de enganche, validado mediante simulación FEA |
Fase 4: Renders Fotorrealistas para Entrega a Fabricación
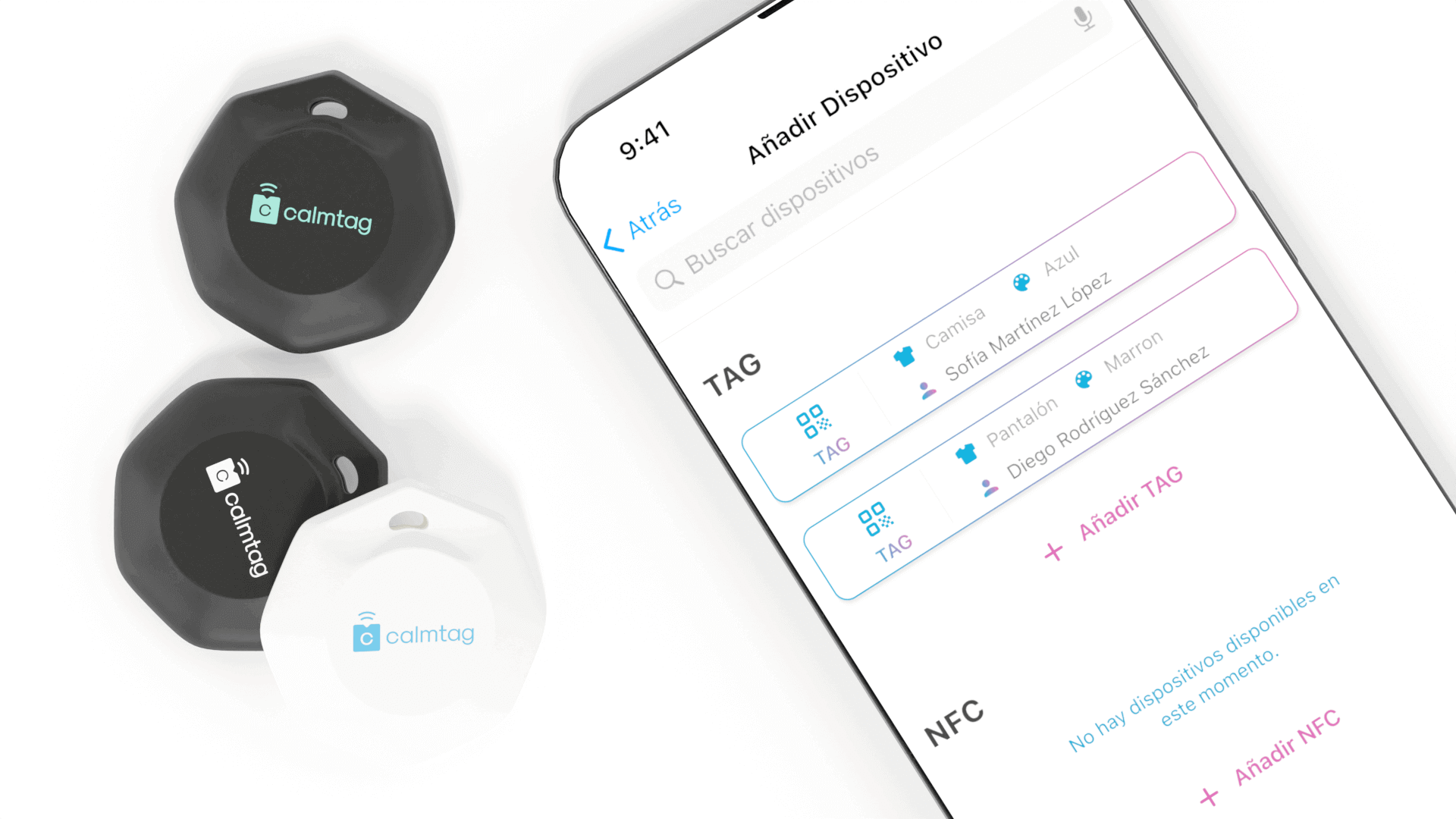
Los entregables finales se produjeron como renders fotorrealistas en dos escenarios de contexto de despliegue:
Fijado a mochila — dispositivo integrado en una posición típica de accesorio de cremallera de mochila, demostrando que el factor de forma es proporcional al accesorio y no altera la estética de la bolsa.

Integrado con ropa — dispositivo fijado a un bolsillo del pecho de chaqueta o posición de clip de cintura, mostrando el perfil de profundidad y cómo el sistema de fijación mantiene el dispositivo al ras con la tela.

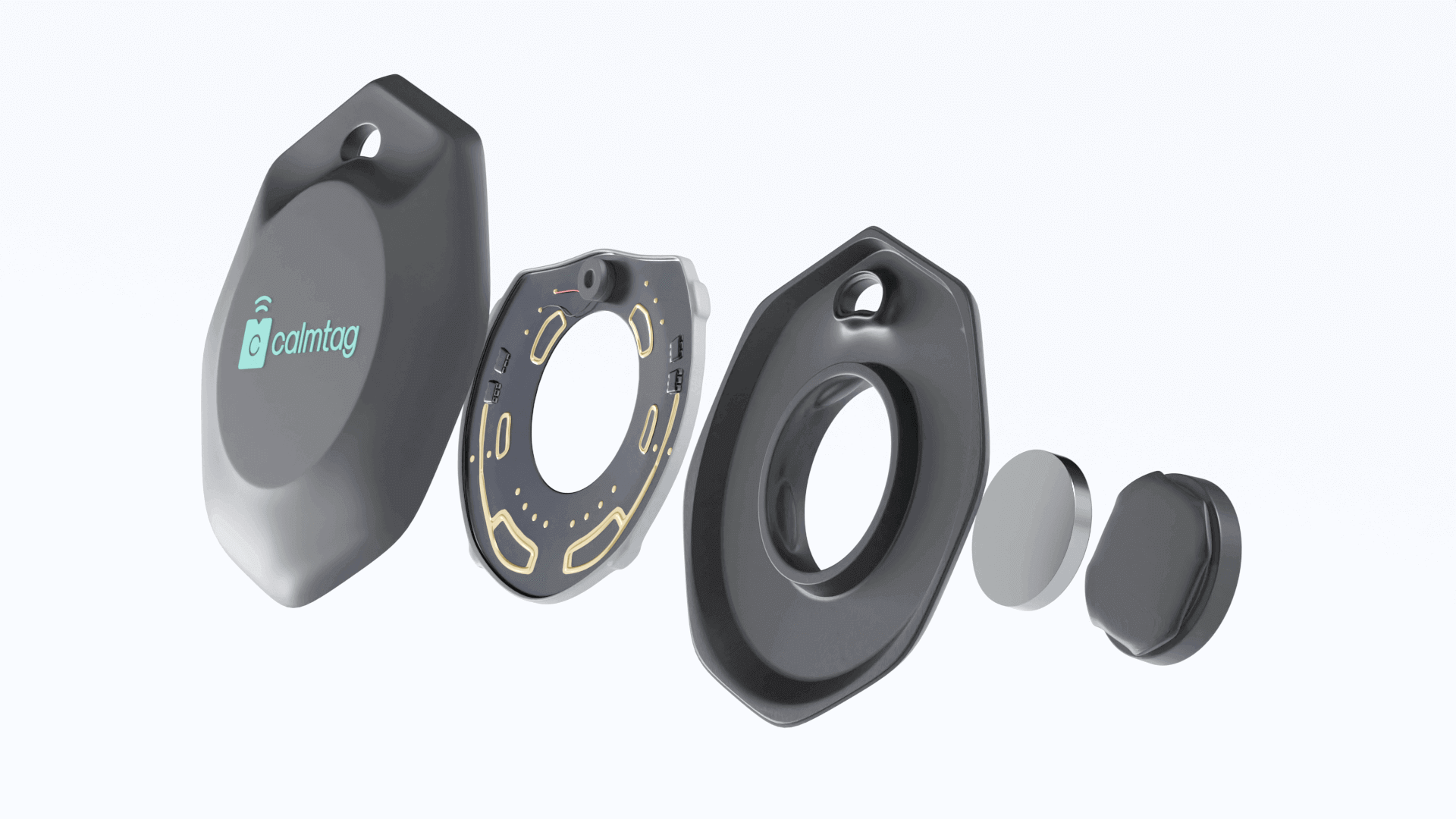
Render de ensamblaje explosionado — muestra la pila de componentes internos, las mitades de la carcasa, el sistema de rail de fijación y todas las posiciones de sujetadores. Este render es el documento principal de entrega para el socio de fabricación.
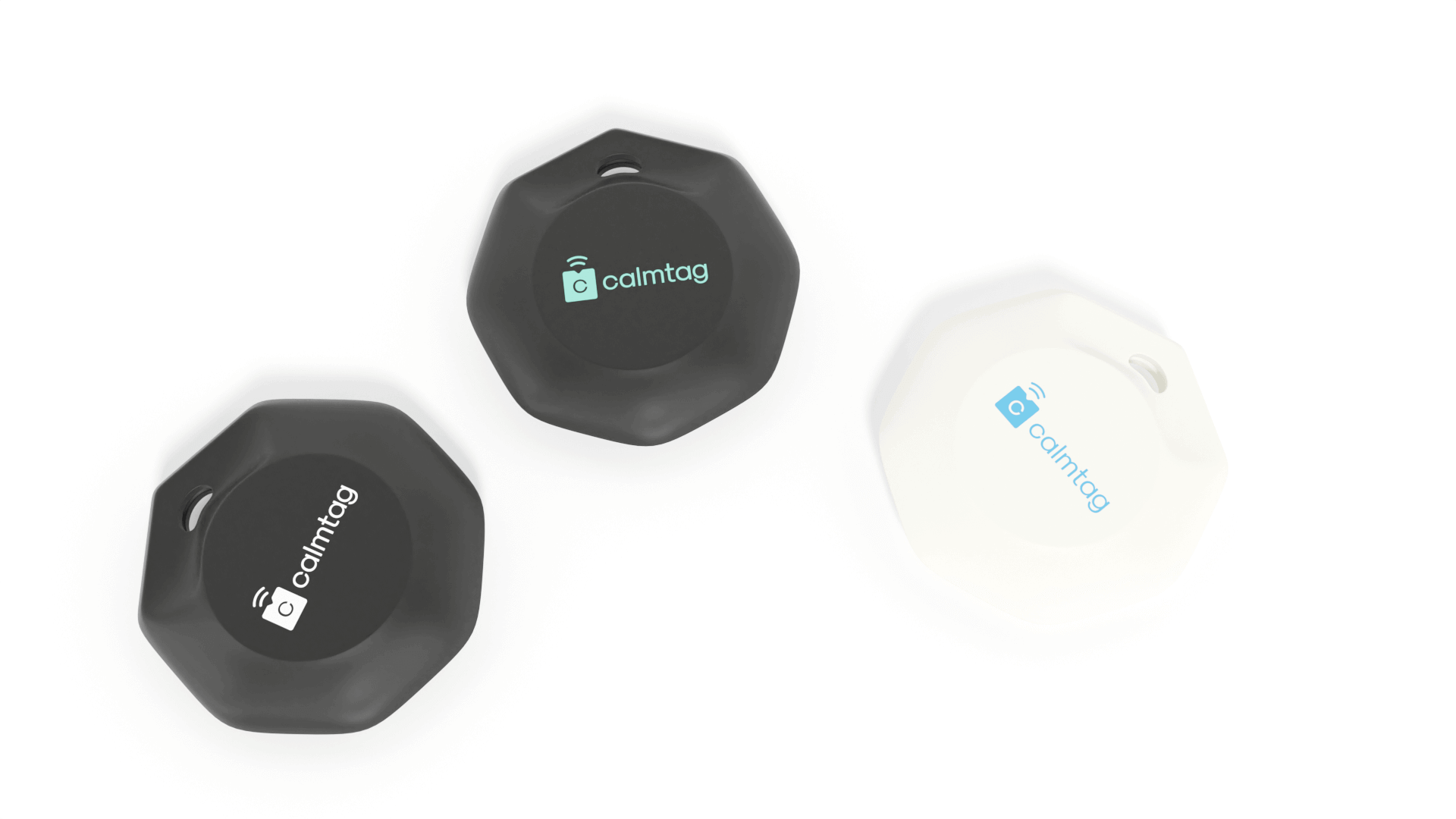
Variantes de color — tres combinaciones de colores (negro, blanco, gris pizarra) renderizadas a especificación de color de producción.
Aplicaciones Tecnológicas
Carcasas de sensores industriales. Los módulos GPS, los sensores ambientales y el hardware de comunicación IoT tienen los mismos requisitos de distancia RF y carcasa sellada que el dispositivo Calmtag. El proceso DFM que sigue Maedcore produce carcasas que pasan del CAD al utillaje sin iteración de diseño en la etapa de fabricación.
Dispositivos de campo robustecidos. El diseño del sistema de fijación multi-modo — accesorios intercambiables en un rail común — es un patrón aplicable a dispositivos de campo que necesitan montarse en múltiples tipos de superficie (tuberías, raíles, paneles de pared, ropa).
Desarrollo de productos de hardware embebido. El proceso de Maedcore desde la disposición de componentes hasta los renders de entrega a fabricación fotorrealistas cubre el ciclo completo de diseño de producto para cualquier producto de hardware que requiera desarrollo de carcasa personalizada.
Tecnologías Utilizadas
Proyecto desarrollado con: Diseño de Dispositivo IoT — Integración de Módulo GPS — Modelado 3D — Ingeniería DFM — Ingeniería de Carcasa — Preparación para Moldeo por Inyección — Render Fotorrealista — Diseño de Producto Hardware Embebido
¿Necesitas una Carcasa Personalizada o Diseño de Producto Hardware?
Maedcore lleva los productos de hardware embebido desde la especificación de componentes hasta los entregables validados por DFM listos para fabricación. Si necesitas un dispositivo IoT, una carcasa de sensor industrial o cualquier carcasa electrónica personalizada diseñada para producción, solicita una consulta de diseño.
Solicitar Consulta de Diseño | Ver Servicios de Mecatrónica | Ver Todos los Casos de Éxito
Lecturas Relacionadas
Más lectura: nuestra guía sobre los mejores programas de modelado 3D en 2026 y las aplicaciones de IA más impactantes para la empresa en 2026.
Sobre el Autor

Eduardo Fuentevilla Blanco
Ingeniero de Robótica
Durante más de una década me ha movido una sola misión: aprovechar la IA y la robótica para construir un mundo de producción automatizada. Creo que, al crear sistemas autosuficientes, podemos devolver a las personas el tiempo para centrarse en lo que de verdad importa: su familia y sus pasiones. Mi experiencia abarca desde ganar prestigiosas competiciones europeas de startups hasta diseñar proyectos complejos que integran hardware y software. Me especializo en cerrar la brecha entre los retos industriales de hoy y las soluciones autónomas del mañana.
¿Listo para transformar tu empresa?
Reserva una reunión gratuita de 30 minutos con un ingeniero.

